Vision robotica con IA
Industria farmacéutica
La visión artificial ayuda a los robots a manipular sacos
En una empresa de renombre internacional de la industria química y farmacéutica, el suministro de sustancias químicas para su procesamiento se organizó, durante mucho tiempo, en forma manual: Los empleados tenían que levantar sacos de hasta 25 kg de peso de los pallets y preparar el contenido para las siguientes fases de producción. Este proceso no era una buena solución desde el punto de vista ergonómico y económico.
El hecho de que el contenido de los sacos esté clasificado predominantemente como mercancías peligrosas llevó a tomar la decisión de automatizar esta parte del proceso productivo en la medida de lo posible y encargar la solución a ASA Automation. La empresa Vision On Line GmbH, especializada en soluciones de automatización basadas en el procesamiento de imágenes, se incorporó como socio para este proyecto.
Séptimo eje para mayor flexibilidad
La parte mecánica del sistema se realizó utilizando un robot de seis ejes con un séptimo eje adicional para la trayectoria de desplazamiento en el eje X. Esta configuración garantiza que los pallets que se colocan en una ubicación definida mediante los elementos de transporte y los productos embolsados que se encuentran sobre ellos estén al alcance de la pinza de succión especialmente desarrollada y puedan alimentar exactamente a la siguiente etapa productiva.
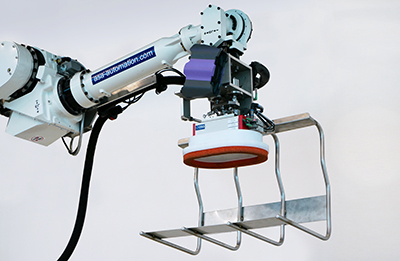
La precisión de agarre es crucial
El levantamiento de los sacos desde su posición en un pallet se realizó con una ventosa de vacío desarrollada especialmente para la aplicación. De este modo se evita que los sacos se comben en mayor o menor medida en función de su contenido y propiedades, lo que garantiza una manipulación confiable del producto. También se requería un alto grado de precisión a la hora de determinar las posiciones exactas de agarre para que los sacos, que no se cogen exactamente por el centro, no puedan romperse al levantarlos o durante el movimiento posterior.
Tratamiento de imágenes con IA
Debido a la geometría variable de los sacos, sus posiciones y los distintos materiales, los métodos convencionales de procesamiento de imágenes para reconocer las posiciones de los objetos quedaron descartados como posible solución. Por lo tanto y para la determinación exacta del punto de agarre se recurrió a la solución de picking 3D EyeT+ Flex, ya que, además de otras herramientas, cubre la posibilidad de enseñar objetos con ayuda de inteligencia artificial.
El ojo del sistema es una cámara instalada en el brazo del robot, que realiza dos escaneados en 3D de los pallets llenos de sacos. La razón es la poca distancia entre la cámara y los objetos, debido de la escasa altura de la sala y la altura relativamente alta de las pilas de sacos. Las imágenes de gran angular en un solo escaneado no eran factibles debido a la distorsión y el uso de un sensor de altura tampoco era posible, ya que existía el riesgo de medir incorrectamente la altura del objeto en los bordes inferiores de los sacos. Esto podría haber provocado colisiones entre la pinza y los sacos. Sin embargo, esta dificultad también podía superarse tomando dos imágenes con la cámara y resumiendo los datos de la imagen mediante un software adecuado.